ROS 提高篇 之 使用SolidWorks软件导出URDF机器人模型文件 — 00 给SolidWorks软件安装 sw_urdf_exporter插件
- 我使用的虚拟机软件:VMware Workstation 11
- 使用的Ubuntu系统:Ubuntu 14.04.4 LTS
- ROS 版本:ROS Indigo
- 我使用的SolidWorks软件的版本: SolidWorks 2011
- 安装SolidWorks软件的电脑系统:Windows 10系统
前提条件:你需要先在你的电脑里面安装SolidWorks软件。SolidWorks软件的下载安装和破解的图文教程,你可以参考这篇博文:Solidworks 2011软件下载,安装和破解图文教程
注意: 1 . ROS 提高篇这个专栏的教学有门槛。 2 . 如果你没有学习前面的教程,请想学习前面的 beginner_Tutorials 和 learning_tf 的ROS 相关教程。 3 . 你还需要会使用SolidWorks软件。这里有相关的博文。
sw_urdf_exporter
参考网站:SolidWorks to URDF Exporter
sw_urdf_exporter它使用一个SolidWorks软件的一个插件,这个插件是ROS团队设计的。sw_urdf_exporter这个插件的官方介绍网站在这里。
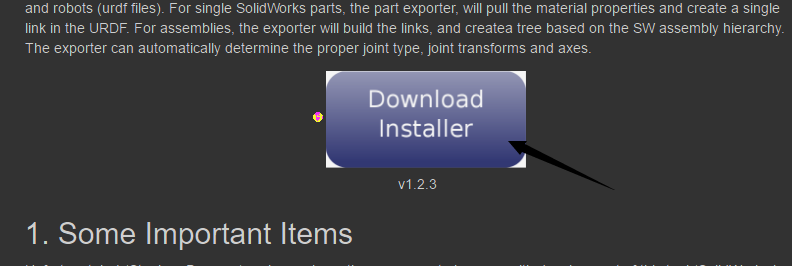
下面来简单的介绍一下这个插件:这个插件的功能是将SolidWorks里面的模型导出成URDF格式的文件,也就是说,我们其实可以管这个插件叫做:SolidWorks里面的URDF文件的导出器。这个导出器将会创建一个类似ROS的包,其中包的路径里面包含模型的网络(Mesh)、纹理(Texture)和机器人模型文件(URDF)文件。对于当个的SolidWorks模型文件,导出程序将在URDF文件里面创建单个链接;对于SolidWorks的装配件,导出程序江湖构建链接,然后在基于SolidWorks组件层次创建结构树,导出程序中的输出器可以自动确定正确的关节类型、关节变换和轴(joint type, joint transforms and axes)。
下载 sw_urdf_exporter
到这个网站里面,直接点击下面这个按钮:
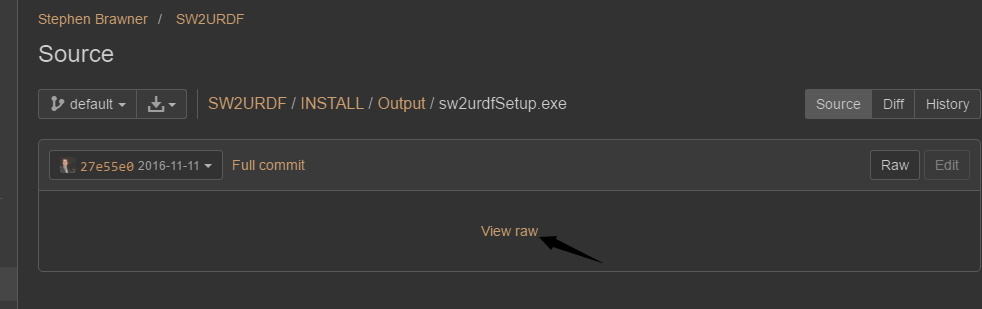
当弹出一个网页,点击里面的 View raw,就可以下载了:
下载后,双击运行。(我现在先不急着运行,我们先说说使用这个软件的注意事项,然后在手把手的给你介绍如何给SolidWorks软件安装这个插件。)
对于这个插件,使用时,需要注意几点
- 这个插件在SolidWorks 2012 版本里面可以正常的使用,但是对于更高的版本不知道兼容性如何。
- 如果你想要获取SolidWorks ROS这个插件最新的通知,你可以在这个网页里面获取到:ROS SolidWorks SIG
- 这个插件不依赖于ROS系统,也就是说,我们可以在我们的安装了SolidWorks软件的Windows 10电脑上,将SolidWorks里面的模型文件通过这个插件将其导出成URDF文件。然后再给别的Ubuntu系统使用。(可以将任何SolidWorks模型文件导出成URDF文件。)
- 这个插件目前只能运行在64位的Windows系统上,32位的系统不能运行。
安装
安装需要注意的事情:
你不能将其安装到标有
SW2URDF的目录。否则运行程序会抛出未处理的异常错误。同时,因为这个插件是使用C#编写的,所以,如果你的电脑里面安装
.NET Framework V4,或者没有升级到.NET Framework V4以上,你需要先安装这个。
上面的两个注意事项的知道了后,我们现在就来安装。双击刚刚下载的安装包。
其实你也可以直接下载源代码,然后在使用Visual Studio 软件来手动编译生成可执行文件。
sw_urdf_exporter项目的源代码在这里下载:
下载需要使用
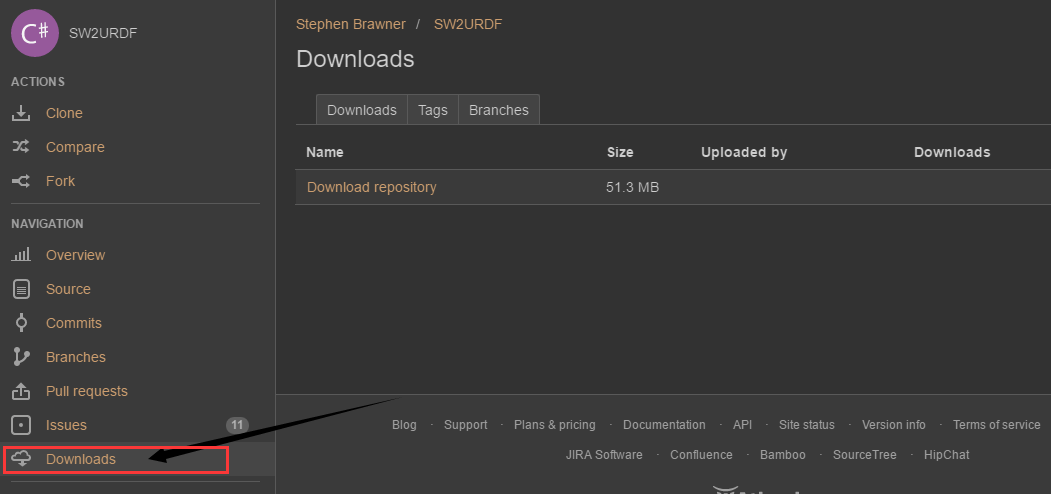
hg或者ssh命令来下载,git工具时不能下载Bitbucket这个网站里面的源代码的,又因为我的Windows系统电脑里面只安装了git工具,所以下面我介绍的下载方法是:直接下载源代码。点击 Download 标签:
然后直接点击 Download repository 就下载了。
下载好了,解压,里面有sw_urdf_exporter项目的源代码,以及一些示例模型(SolidWorks模型)。
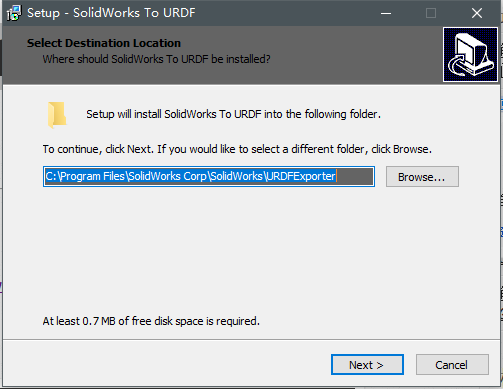
(我们这里是使用安装包进行安装。)双击安装包,它会自动的识别到你电脑里面当前安装了SolidWorks软件的路径。我们直接 Next。
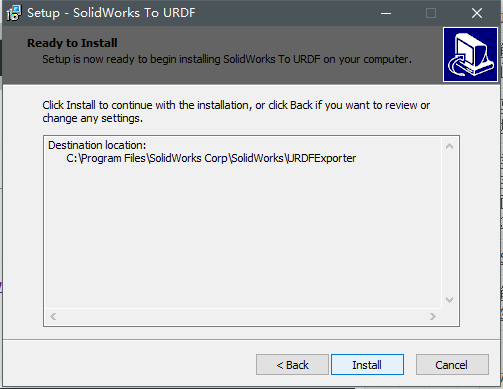
点击 Intall
秒速完成。点击 Finish
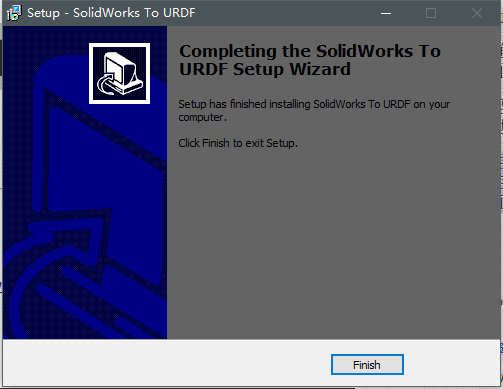
好的,现在已经安装完成了。现在启动SolidWorks软件:
选择: 插件…
你会在 其他插件 里面看到一项 SW2URDF,正确情况是被勾选的,如果没有被勾选,请勾选。

搞定
现在就已经想这个插件安装成功了。下面我们就来测试一下这个插件如何使用。
使用这个插件
对于这个插件,ROS官方给出了专门的教程,在这里。
接下来,下一个博文,我们就来介绍,这个插件如何使用。