当我在编译Windows 上编译 PCL源代码的时候,它zlib库和png库的依赖,但是现在我的电脑里面并没有两个库。所以,我们现在就来手动的下载这两个库的源代码,然后亲自编译它们。
参考网站:http://www.voidcn.com/blog/glunoy/article/p-6019106.html
我现在知道了。png库是依赖于zlib库的。(所以我们需要先编译zlib库)
现在我们电脑里面已经有zlib库了(我也不知道这个库是正有还是假有。不过当我们下面使用CMake-GUI软件生成png库的时候,CMake-GUI软件自动的天添加了zlib库的include文件的路径。所以,现在,我们就姑且认为当前的电脑立里面已经存在zlib库了。(但是我们继续后面的步骤发现,其实电脑里面并没有zlib库。)),但是没有png库,我们现在需要下载源码并编译:
到这里png库官网下载:http://libpng.sourceforge.net/index.html

下载 libpng16库:
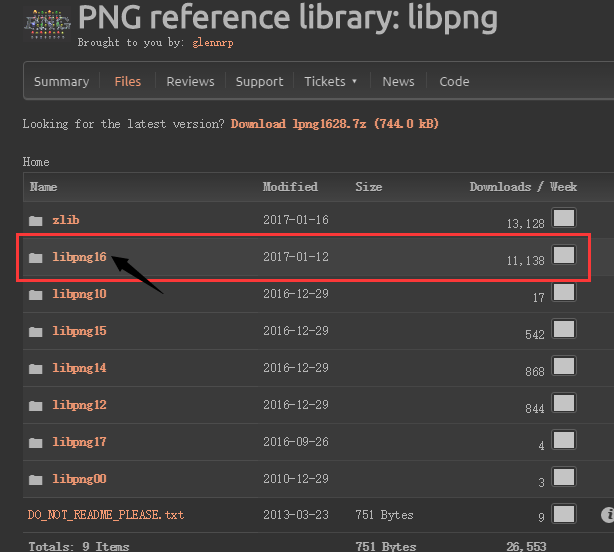
下载,人下载最多的那个:
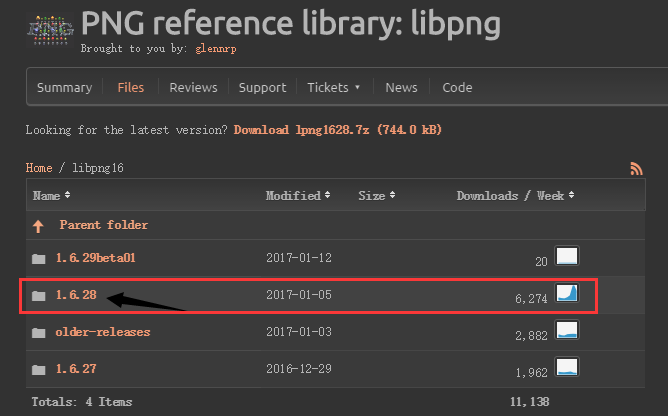
接着是:
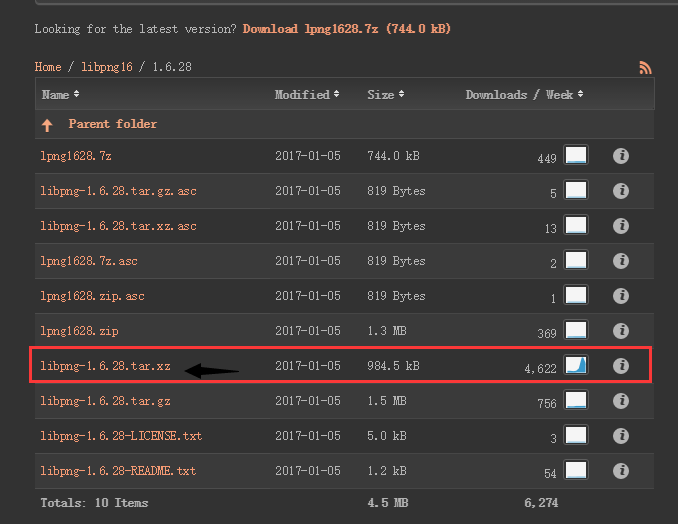
下载后解压。
然后使用CMake-GUI软件生成编译文件:

出现一个错误:
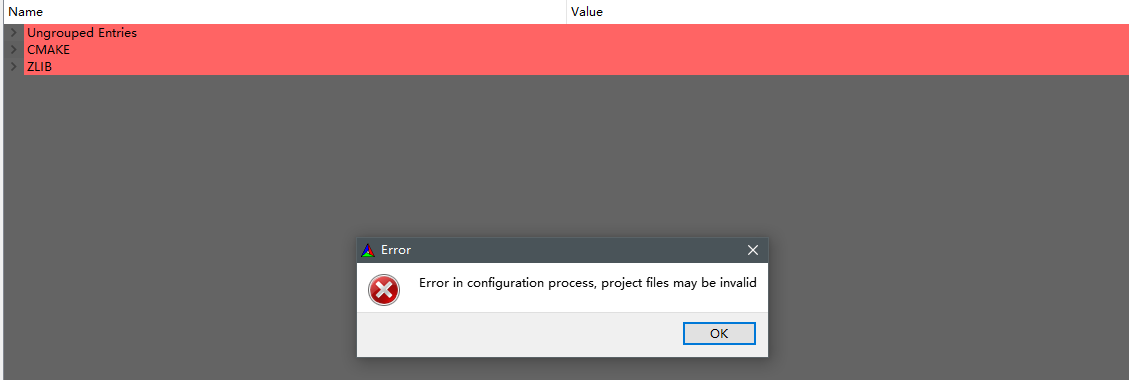
错误的原因就是没有找到ZLIB库的链接文件:

手动添加,这个两个(Debug 和 Release)都填写同一个文件:

现在再点击 Configure 按钮。
没有错误了。但是现在有红色的条目:

现在再点击一次 Configure 按钮。红色条目消失:

现在点击 Generate 按钮生成编译文件:

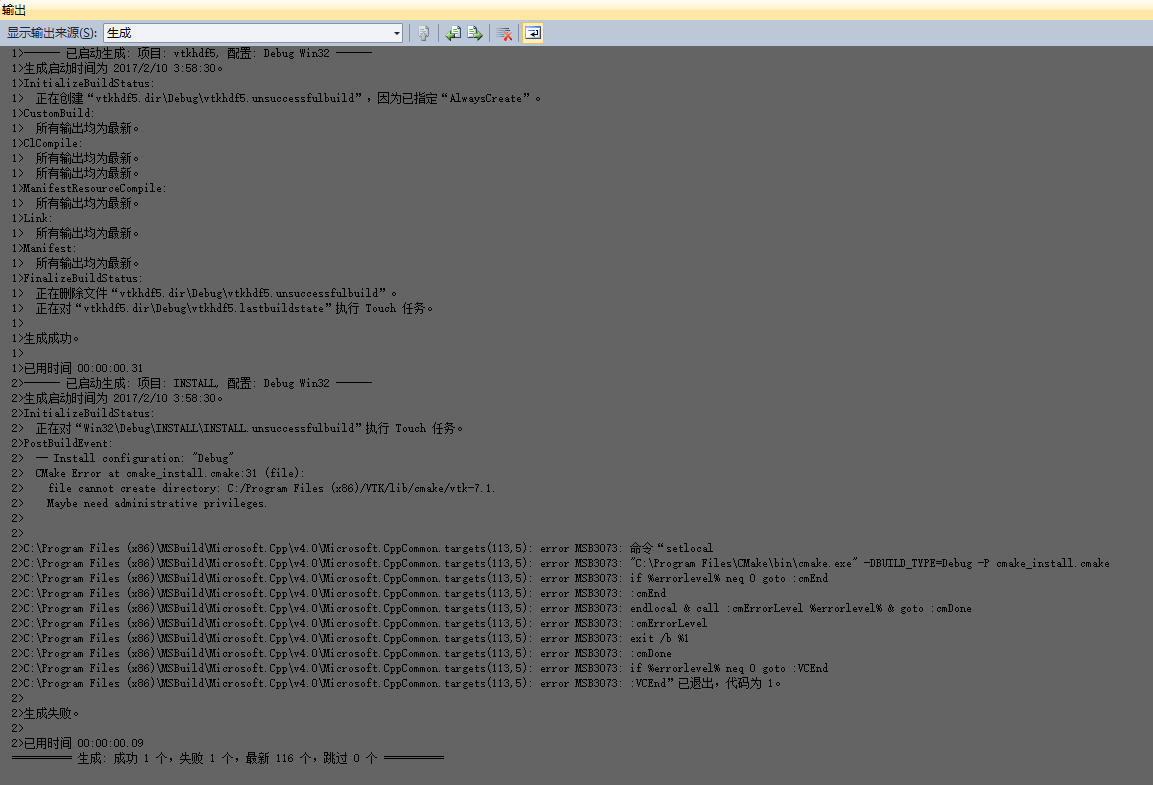
现在开始使用VS2010软件编译:

看来现在不行啊,我需要先下载并编译zlib库,然后在下载并编译png库。这才是正确的步骤。
我们现在下载并编译zlib库:
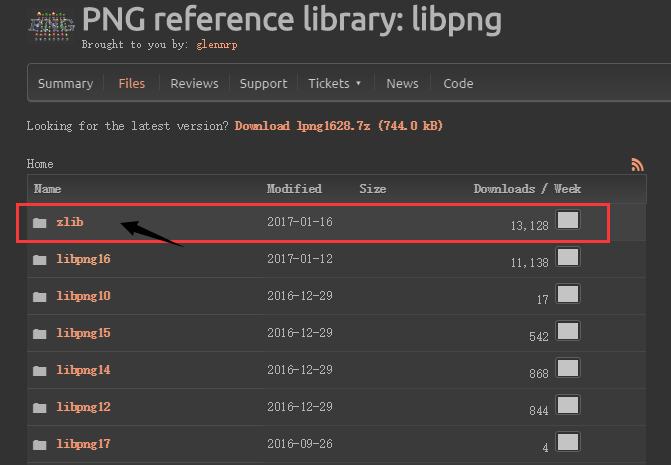
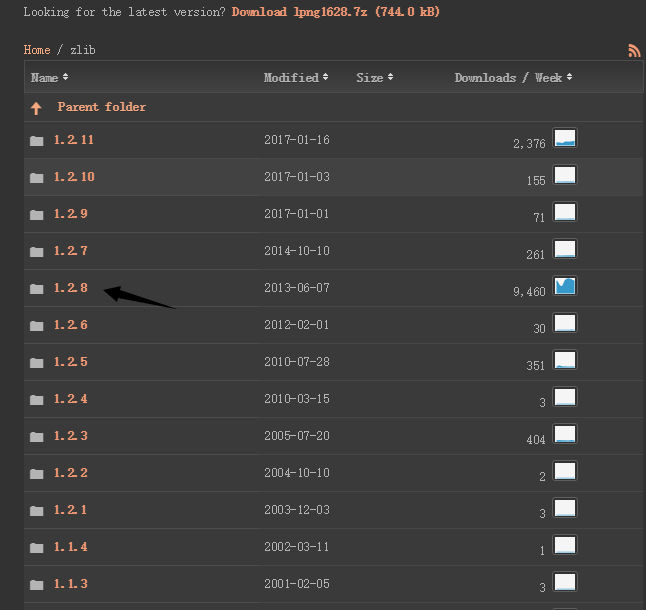
下载zlib库源代码:
下载:https://sourceforge.net/projects/libpng/files/
依次的步骤是:
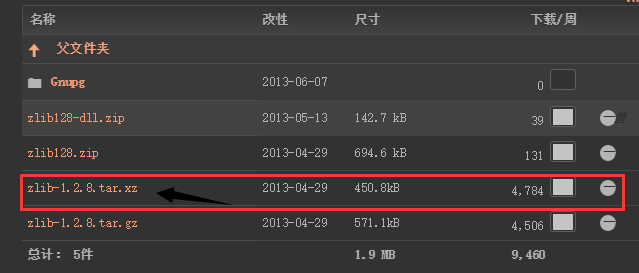
下载完成后,我使用7-zip软件对其进行了两次解压。
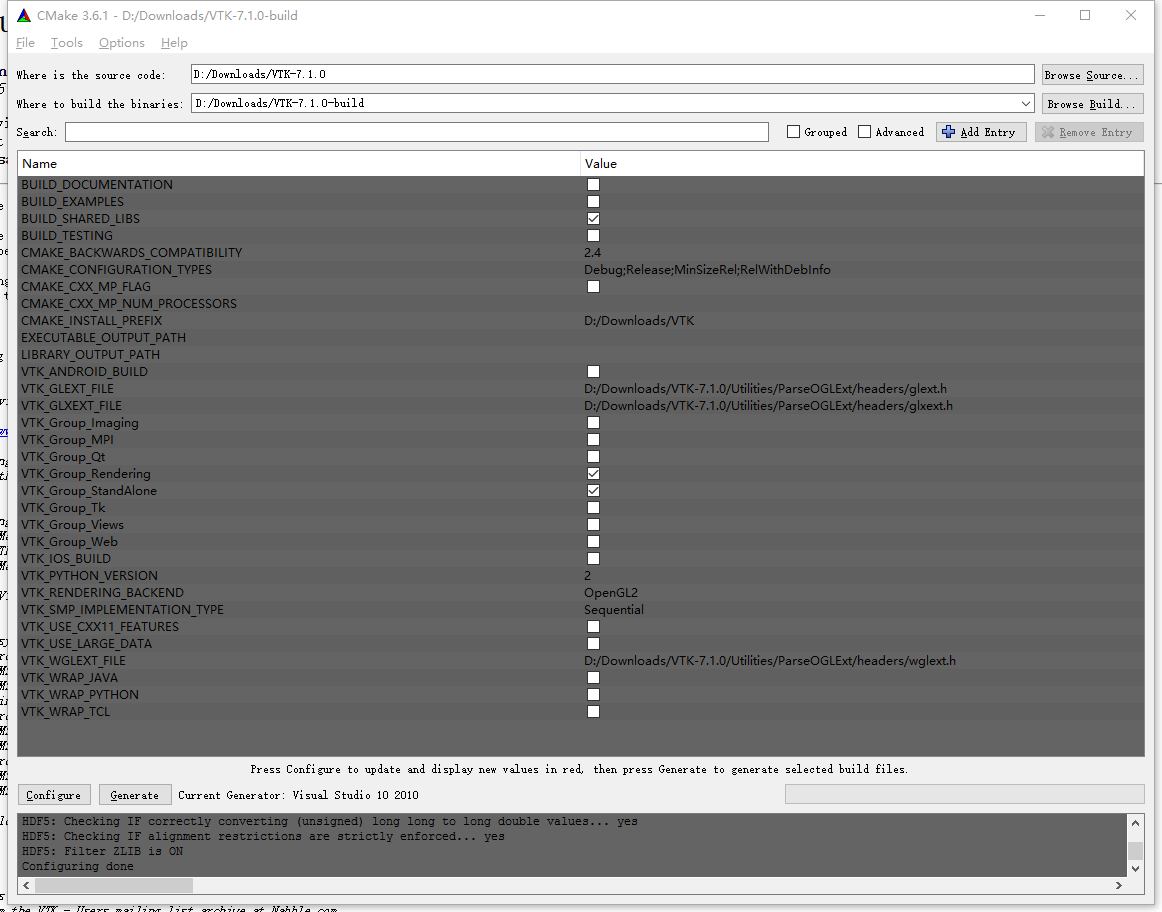
然后使用CMake-GUI软件给它生产编译文件:

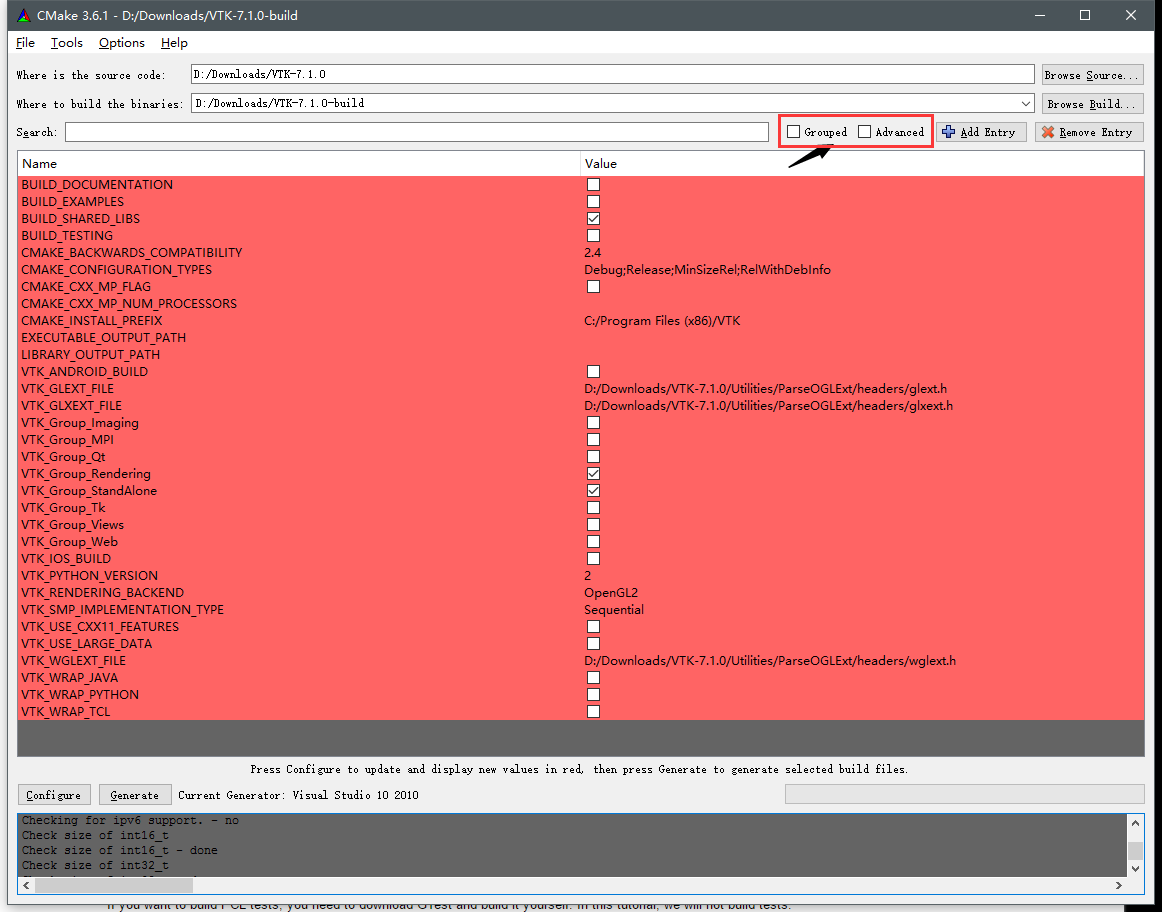
点击 Configure按钮进行配置:
没有出现错误,出现了红色的条目:
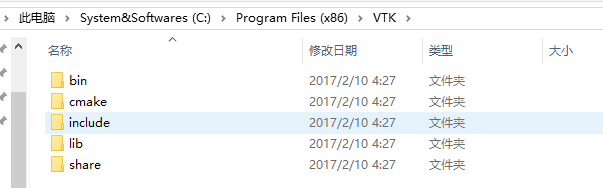
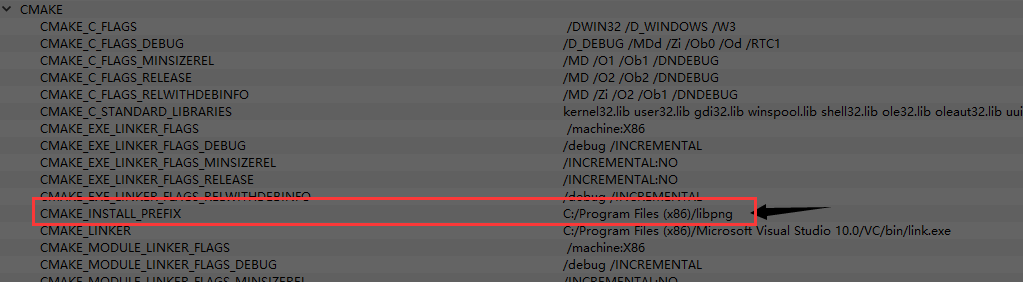
我们现在来仔细的看看INSTALL条目:

默认的添加的路径都是C:\Program Files (x86)。我们不能使用这个安装路径,原因是当我们一会在使用VS2010软件编译生成的编译文件的时候,会出现错误的,错误的原因是:没有权限。所以,我需要将这部分INSTALL条目的路径都修改为我们有权限的路径。

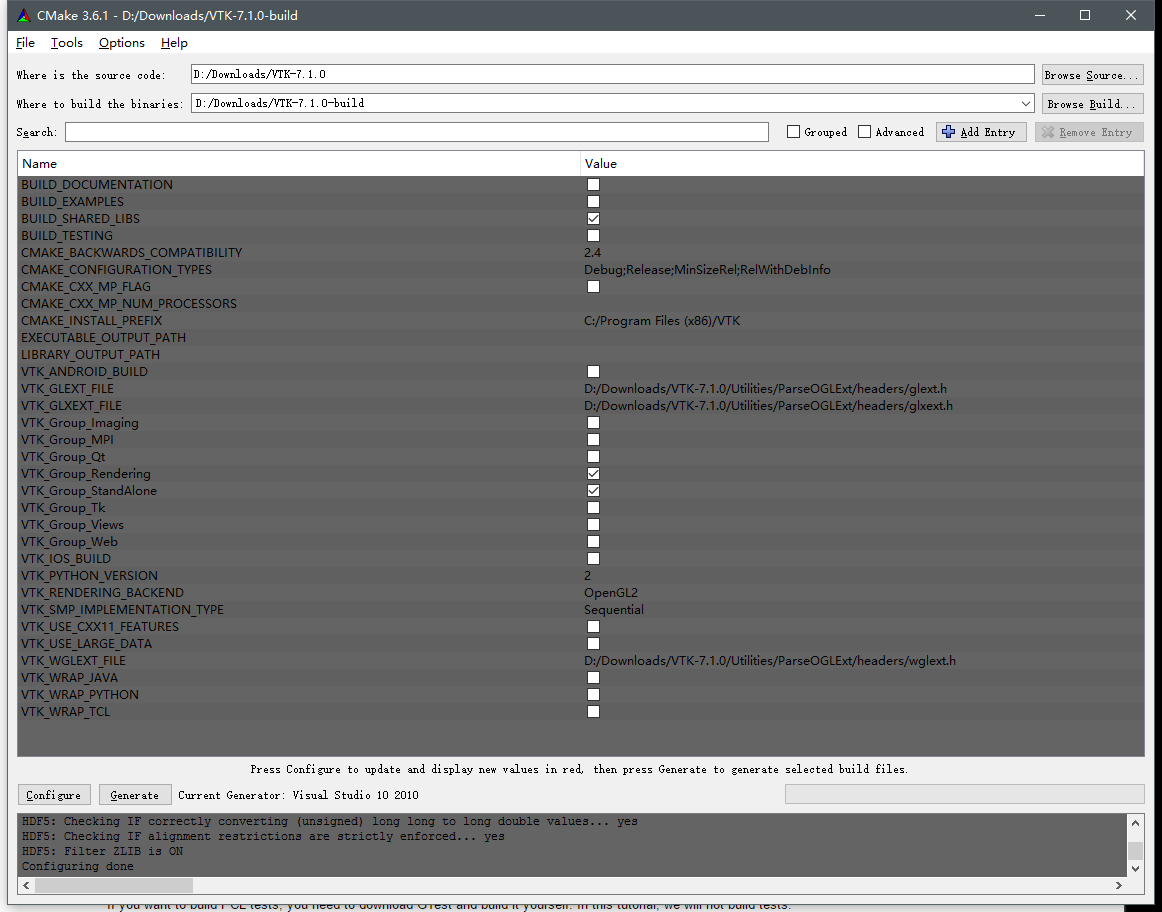
然后在点击 COnfigure 按钮。红色条目消失。

然后在点击 Generate 按钮。
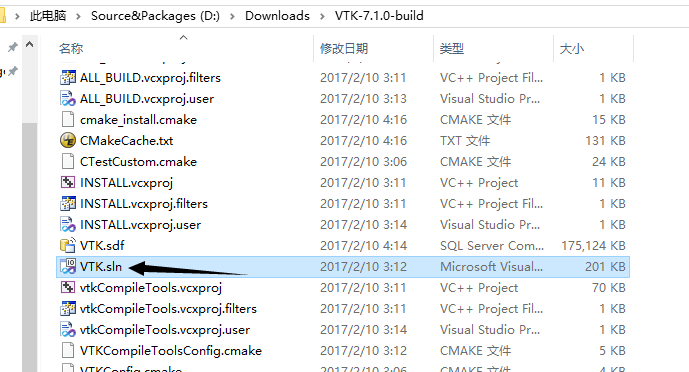
现在使用VS2010软甲打开刚刚生成的.sln文件:
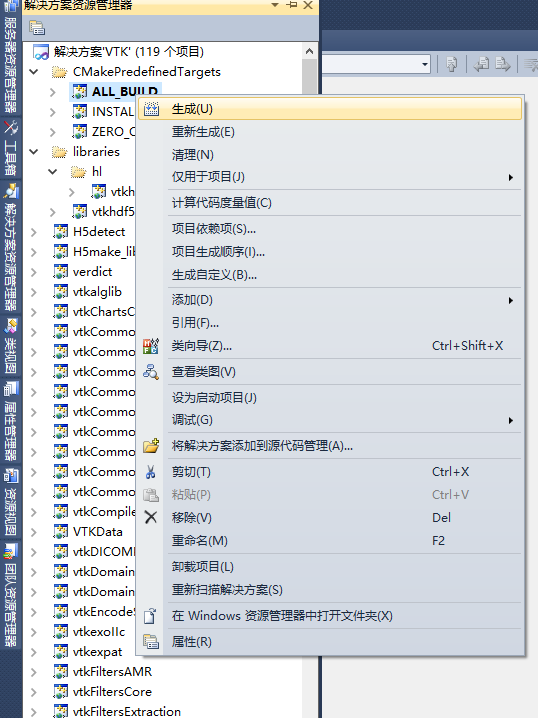
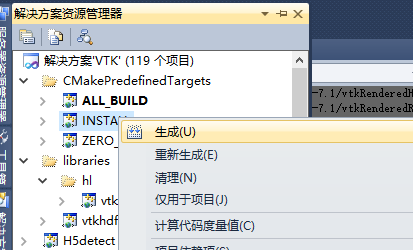
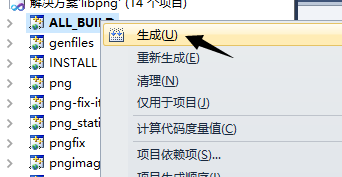
生成:
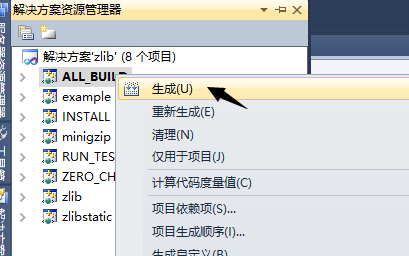
很快,不到1秒钟就编译完成了:

然后对 INSTALL项目进行生成
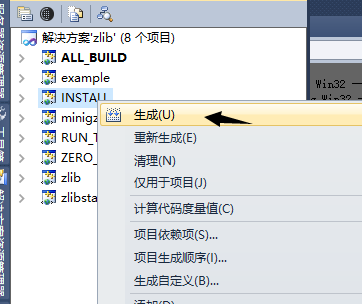
也是秒速编译完成:

生成成功:
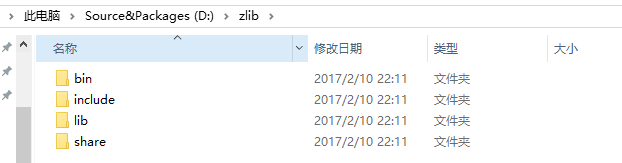
现在,我们将这个生成的文件夹,剪切到C:\third_packages路径里面。(我自己的一个习惯,我喜欢将第三方库放在这个路径下。)
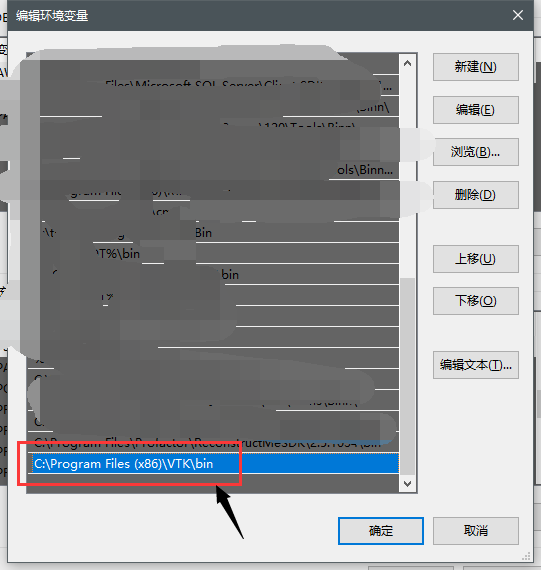
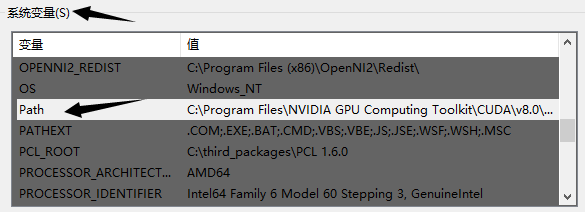
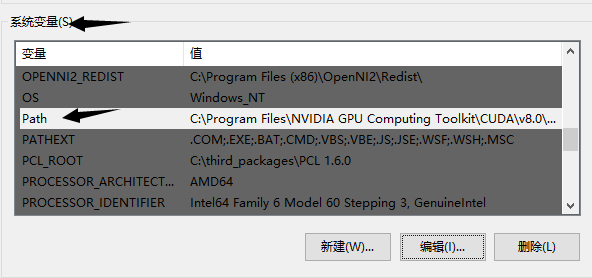
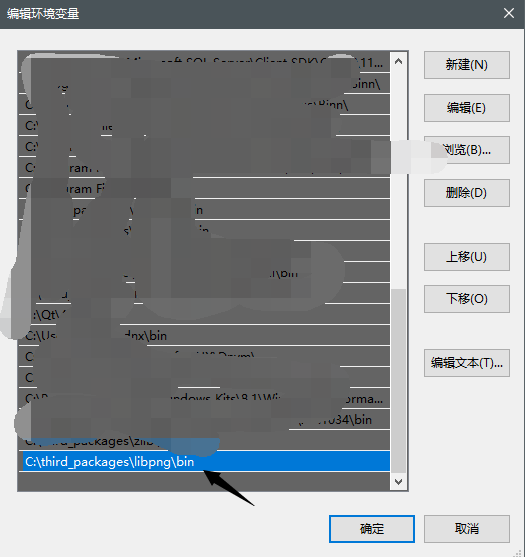
我们还需要将zlib库的png路径添加到系统的环境变量里面。
现在我们可以将下面这两个文件夹给删除了。(一个是zlib的源代码。一个是zlib的编译文件)(当然,我们删除这两个文件夹之前,需要先关闭VS2010软件,因为刚刚VS2010软件一直在使用其中一个文件。CMake-GUI软件可以不用关闭,它不影响。)

接下来,我们来编译 png库:

修改zlib库(png库依赖于这个库)条目为正确的路径:

现在点击 Configure 按钮。
红色的条目都消失了。现在有用一个点:我们需要注意这个安装路径:
和zlib库是一样,我们需要给这个安装路径修改为一个我们可以控制的权限的路径。
修改为:

现在点击 Configure 按钮,然后在点击 Generate 按钮:搞定

现在使用VS2010软件对生成的编译文件进行编译:
编译成功,一共没有用了3秒钟:

然后是编译 INSTALL项目:
秒速编译完成:

一样,我们将得到的文件夹剪切到 C:\third_packages这个路径里面。
然后将png路径添加到环境变量里面:
最后一步就是清理战场:删除下面两个文件夹:(清理前,需要先关闭VS2010软件)
好的,这样,zlib 和 png 这两个库就编译完成了。
搞定